|
|
Post by Jerrymac on Nov 20, 2010 0:35:40 GMT -5
That's good to hear. That should make the set up go a lot smoother for you.
|
|
|
|
Post by chipbutty on Nov 21, 2010 12:13:23 GMT -5
I've never setup a pull and push system before and it's a bit of a learning curve! It's a bit like doing a jigsaw in that everything has to be lined up perfectly but once it is it all falls into place. Quite frustrating, but isn't everything when you do it for the first time?   |
|
|
|
Post by dunkonu23 on Nov 21, 2010 15:18:14 GMT -5
It looks really good! I'm happy you got the aileron and pitch bell cranks to be level with the plastic lip on the frame. That's critical. I do have a suggestion for you, though.
It looks like you're going to mount the ESC inside the frame and use a flight battery. If that's the case, it looks like you're mouting the receiver to the rear. I tend to think I'd mount the ESC in the front and the flight battery between the frames. That way you really limit the chance of electrical interference from the ESC to the receiver. You also get a little more flexibility in COG adjustments because you can slide the battery around between the frames, find the sweet spot, then lock it in.
Scott
|
|
|
|
Post by chipbutty on Nov 21, 2010 17:08:52 GMT -5
Hi Scott - Thanks. That's not part of my final setup. I just threw my T250 lipo in there and stuffed the ESC anywhere for setup purposes so I could get power to the Rx. It looks really good! I'm happy you got the aileron and pitch bell cranks to be level with the plastic lip on the frame. That's critical. I do have a suggestion for you, though. It looks like you're going to mount the ESC inside the frame and use a flight battery. If that's the case, it looks like you're mouting the receiver to the rear. I tend to think I'd mount the ESC in the front and the flight battery between the frames. That way you really limit the chance of electrical interference from the ESC to the receiver. You also get a little more flexibility in COG adjustments because you can slide the battery around between the frames, find the sweet spot, then lock it in. Scott |
|
|
|
Post by gauiman on Nov 21, 2010 18:58:11 GMT -5
Looking good, Scott where do you plan on mounting your gyro?
|
|
|
|
Post by dunkonu23 on Nov 21, 2010 19:15:04 GMT -5
Hi Scott - Thanks. That's not part of my final setup. I just threw my T250 lipo in there and stuffed the ESC anywhere for setup purposes so I could get power to the Rx. It looks really good! I'm happy you got the aileron and pitch bell cranks to be level with the plastic lip on the frame. That's critical. I do have a suggestion for you, though. It looks like you're going to mount the ESC inside the frame and use a flight battery. If that's the case, it looks like you're mouting the receiver to the rear. I tend to think I'd mount the ESC in the front and the flight battery between the frames. That way you really limit the chance of electrical interference from the ESC to the receiver. You also get a little more flexibility in COG adjustments because you can slide the battery around between the frames, find the sweet spot, then lock it in. Scott Looks good. What I do for setup is just use a cheap Nicad battery, that way I don't ever worry about the motor spinning up... it's connected right to the receiver power connector or through a servo extension on the outside of the frame that runs to the receiver power connector. Scott |
|
|
|
Post by chipbutty on Nov 21, 2010 19:24:59 GMT -5
That's what I'd do if I had a Nicad. So just I just disconnect the motor leads and connect a lipo to the ESC and do it that way. Hi Scott - Thanks. That's not part of my final setup. I just threw my T250 lipo in there and stuffed the ESC anywhere for setup purposes so I could get power to the Rx. Looks good. What I do for setup is just use a cheap Nicad battery, that way I don't ever worry about the motor spinning up... it's connected right to the receiver power connector or through a servo extension on the outside of the frame that runs to the receiver power connector. Scott |
|
|
|
Post by Jerrymac on Nov 21, 2010 23:32:00 GMT -5
Great job. Looks like you got the set-up spot on. Make sure you check for any binding after setting up your collective and cyclic pitch ranges.
What I do is go to full positive pitch then "stir" the cyclic stick, then full negative pitch and "stir" again. If there is any binding you will notice that the main shaft will rotate slightly while stirring the cyclic stick. If that happens you may need to reduce the pitch ranges, although it isn't likely that you will be at full collective and cyclic while actually flying.
Jerry
|
|
|
|
Post by chipbutty on Nov 22, 2010 8:59:18 GMT -5
Is that one for me Gauiman? I'm guessing you've got myself and Scott mixed up ;D I was just thinking of mounting it in the mount location provided at the back of the frame. Looking good, Scott where do you plan on mounting your gyro? |
|
|
|
Post by chipbutty on Nov 22, 2010 9:09:14 GMT -5
Cheers Jerry. These are the first digital servos I've had on cyclic. I didn't realise how buzzy digital servos are. Perfectly normal though as far as I understand. I can't detect any binding at the extreme edges. I did detect what sounds like a binding noise but that quickly disappears, so it may just be the noise these servos make as they settle after an input. Tried the trick you suggested by looking at the shaft and it doesn't move. So all seems ok. Slight bit of tweaking to get zero pitch. Though it's actually a choice of either -0.5 or +0.5 depending on one full turn either way. Can you do half turns on these links? That may get perfect zero. Mind you I do use a digital pitch gauge as well as a regular gauge and you do find that you will never get true zero pitch at midstick with a deadly accurate digital gauge! You can drive yourself mad chasing fractions of a degree with a digital pitch gauge and I'm not a big fan of using them in this application. Great gadgets though! It's just as easy to lay the heli on its side and let the blades dangle from a table and see if the two blades meet to achieve zero pitch at midstick. Great job. Looks like you got the set-up spot on. Make sure you check for any binding after setting up your collective and cyclic pitch ranges. What I do is go to full positive pitch then "stir" the cyclic stick, then full negative pitch and "stir" again. If there is any binding you will notice that the main shaft will rotate slightly while stirring the cyclic stick. If that happens you may need to reduce the pitch ranges, although it isn't likely that you will be at full collective and cyclic while actually flying. Jerry |
|
|
|
Post by chipbutty on Nov 22, 2010 11:40:45 GMT -5
Onto mounting the tail servo. I used one for the Trex 600 and modified it to accept a smaller servo. It's slightly too big for the Gaui boom but fits securely with a couple of zip ties. 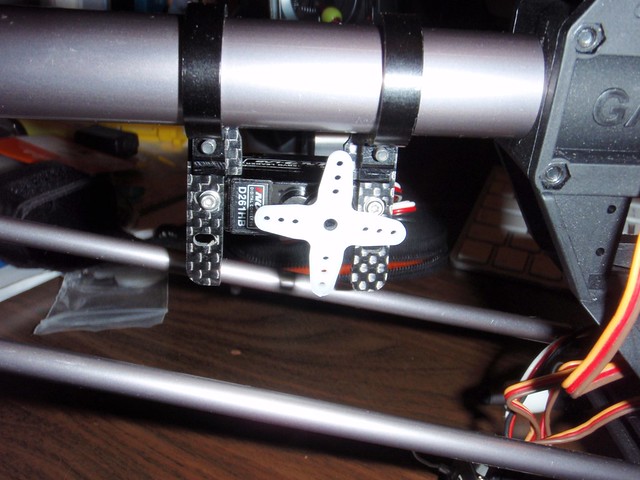  |
|
|
|
Post by chipbutty on Nov 22, 2010 13:39:00 GMT -5
Can anyone recommend a decent external BEC for my 425? Better to be safe than sorry, especially after reading the article from Lucien Miller which was posted on Helifreak today. Jerry, I think you're using a HobbyWing BEC. Is it this one? www.giantcod.co.uk/hobbywing-575a-ubec-lipoly-p-402620.html |
|
|
|
Post by Jerrymac on Nov 22, 2010 14:27:19 GMT -5
Can anyone recommend a decent external BEC for my 425? Better to be safe than sorry, especially after reading the article from Lucien Miller which was posted on Helifreak today. Jerry, I think you're using a HobbyWing BEC. Is it this one? www.giantcod.co.uk/hobbywing-575a-ubec-lipoly-p-402620.htmlYep, that's one I use on my 425. No problems with it so far. |
|
|
|
Post by chipbutty on Nov 22, 2010 14:42:06 GMT -5
Cheers Jerry.
|
|
|
|
Post by dunkonu23 on Nov 23, 2010 16:56:44 GMT -5
That's an interesting take on a boom servo mount. What I did with a T-Rex 600 mount was file down the thicker side of the screw clamp until it fit the boom tightly. I did the same thing with an aluminum mount. Works great.
Scott
|
|
|
|
Post by chipbutty on Nov 24, 2010 5:43:20 GMT -5
An interesting take  Is it this bit you file down? Could look tidier than zip ties! The zip tie solution works well and Align recommend it in their manuals. But I've never understood why they just don't make their mounts fit properly in the first place. Obviously this mount is oversized anyway for the Gaui boom.  That's an interesting take on a boom servo mount. What I did with a T-Rex 600 mount was file down the thicker side of the screw clamp until it fit the boom tightly. I did the same thing with an aluminum mount. Works great. Scott |
|
|
|
Post by chipbutty on Nov 24, 2010 5:50:09 GMT -5
Made a straight push rod. Cut down the rod then used a small piece of carbon tube to join the two pieces then stuck together with epoxy. Finally wrapped some cotton thread tightly around the carbon piece then soaked the cotton in CA. To tidy things up a bit of heat shrink. Could have looked neater but this thing should be strong.  |
|
|
|
Post by dunkonu23 on Nov 24, 2010 14:49:34 GMT -5
An interesting take Is it this bit you file down? Could look tidier than zip ties! The zip tie solution works well and Align recommend it in their manuals. But I've never understood why they just don't make their mounts fit properly in the first place. Obviously this mount is oversized anyway for the Gaui boom. That's an interesting take on a boom servo mount. What I did with a T-Rex 600 mount was file down the thicker side of the screw clamp until it fit the boom tightly. I did the same thing with an aluminum mount. Works great. Scott Exactly... the thicker of the two sides. You shouldn't have to take off much. Scott |
|
|
|
Post by chipbutty on Nov 24, 2010 19:04:20 GMT -5
Got the HobbyWing BEC today. Did you do anything with that vulnerable looking on/off switch?  Can anyone recommend a decent external BEC for my 425? Better to be safe than sorry, especially after reading the article from Lucien Miller which was posted on Helifreak today. Jerry, I think you're using a HobbyWing BEC. Is it this one? www.giantcod.co.uk/hobbywing-575a-ubec-lipoly-p-402620.htmlYep, that's one I use on my 425. No problems with it so far. |
|
|
|
Post by Jerrymac on Nov 24, 2010 22:17:53 GMT -5
|
|




 Is it this bit you file down? Could look tidier than zip ties!
Is it this bit you file down? Could look tidier than zip ties!